Otter ROVEX
Autonome operasjoner ved overflaten og havbunnen
Industridesign
|
Maritime Robotics, Blueye Robotics
Kort om prosjektet
Otter ROV extension (ROVEX) er en utvidelse designet for å la Maritime Robotics' autonome overflatedrone fire ned en Blueye undervannsdrone (ROV). Projektet ble gjennomført i faget Design 6 - Fremtider, vårsemesteret 2024 sammen med Tomas Bønes Wedege.


Kommentar
Fra industrien så er dette en soleklar A!! Råimponert hvordan dere har klart å transformere mine elendige tavleskisser og prating på inn- og utpust til noe så tilnærmet produktklart! Nå gjelder det å få produsert første industriversjon å få dette ut i verden!!
Utgangspunkt
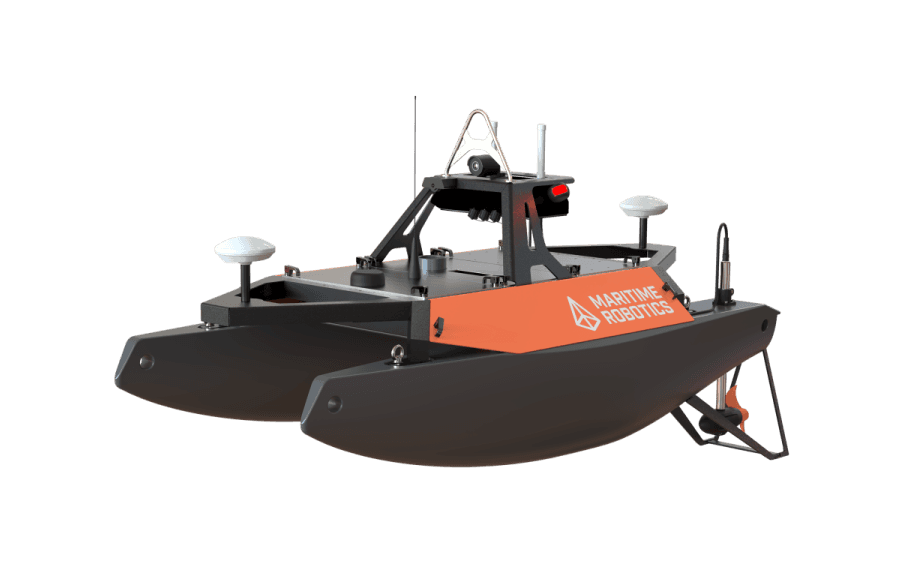
Otter USV
Otteren er bygd for bruk nær kysten og i havneområder. Ekstrautstyr kan enkelt monteres i rammen (grå kasser). Vanligvis utstyres Otteren med en sonar i bakre tredel av rammen. Denne gir klare målinger ned til 80 meters dyp.

Blueye X3 ROV
Blueye X3 har innebygget kamera, men kan utstyres med bl.a. gripeklo og sonar. Signaler sendes til ROV-en gjennom kabel fra en mottaker på overflaten. Kabelen brukes også til innhesing av ROV-en.
Bruksområde
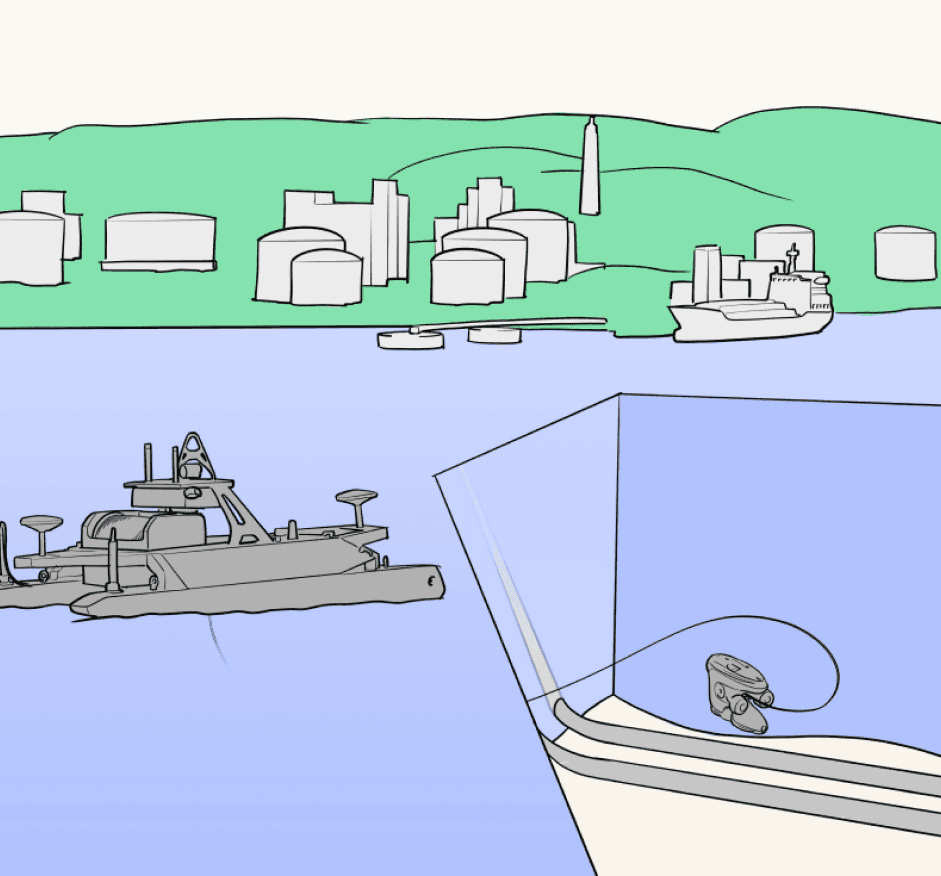
Autonom inspeksjon
Målet er å gi brukeren muligheten til å skanne havbunnen autonomt, for så å kunne dykke ned og undersøke eventuelle uregelmessigheter, f.eks på en gassledning.
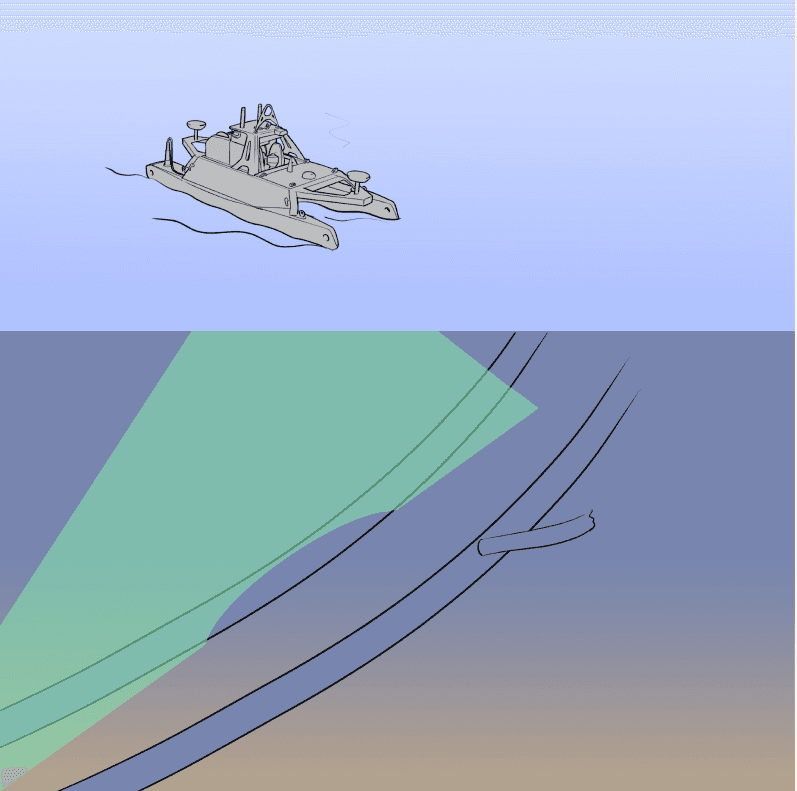
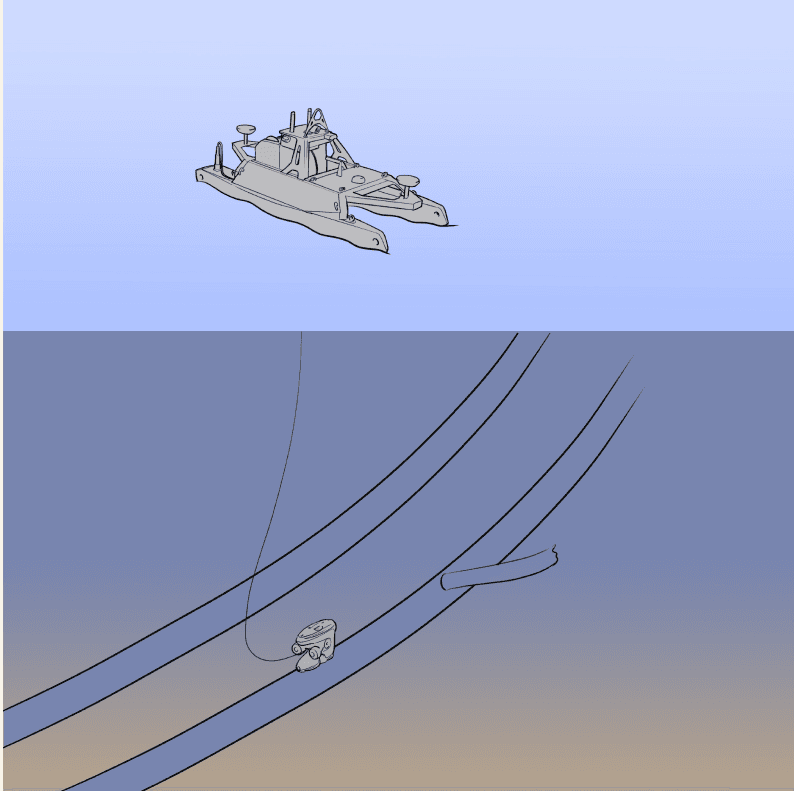
Sonar og kamera
Sonaren til Otteren vil først oppdage en uregelmessighet på rørledningen. Blueyen brukes deretter til å supplere sonarbildet, og avgjøre hva objektet eller feilen er.
Krav til modulen
Modulen må
Håndtere av- og påspoling av kabel
Oppbevare ROV-en trygt under forflyttning
Forhindre rask eller sterk belastning på kabel
Ikke overskride Otterens lastekapasitet på 30 kg.
Modulen burde også
Være enkel å montere
Være kompatibel med eksisterende Otter USV
Følge Maritime Robotics’ formspråk4
Gjenbruke deler/produksjonsteknikker fra Otteren
Være kompatibel med bruk av multibeam-sonar
Fra skisse til fullskala
På dypt vann
Å designe en modul for å kombinere to ekisterende produkter, og samtidig ta hensyn til vær, vind, vekt, kostnad og produserbarhet er …vanskelig. Jeg og Tomas følte vi (bokstavlig talt) arbeidet på dypt vann. Den viktigste vi lærte var "å være bevisst på hva vi selv ikke kan nok om, og finne ut hvem som kan nok om det".
Prototype
Maritime Robotics hadde allerede fått laget en prototype. Her var hovedproblemet var at systemet ikke kunne kombineres med annet ekstrautstyr som bl.a. sonar.
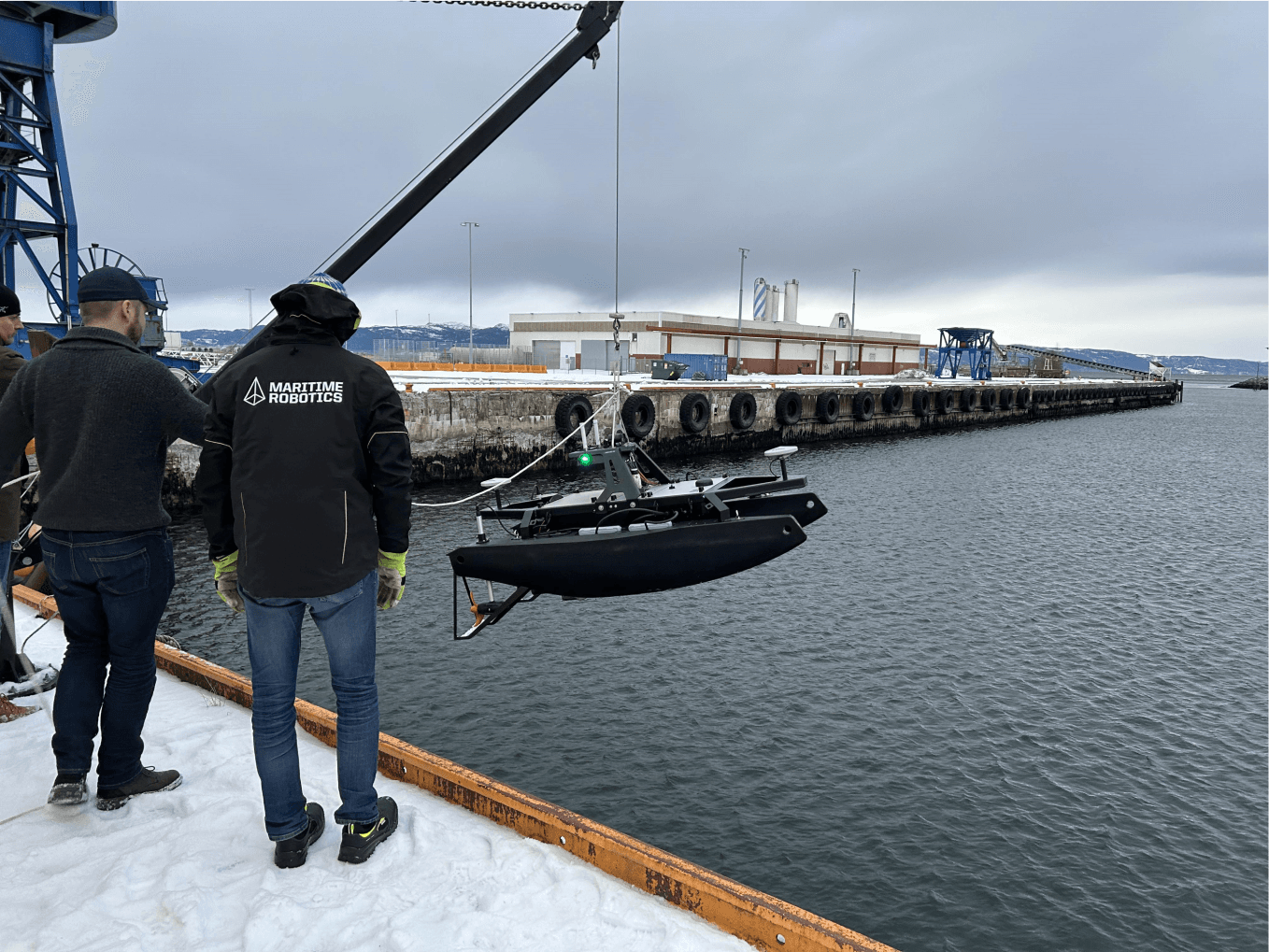
Felttest med Blueye og Otter
Som start på prosjektet fikk vil delta på en test av et scenario med inspisering av havnebasseng, men uten utstyr for sammenkobling.
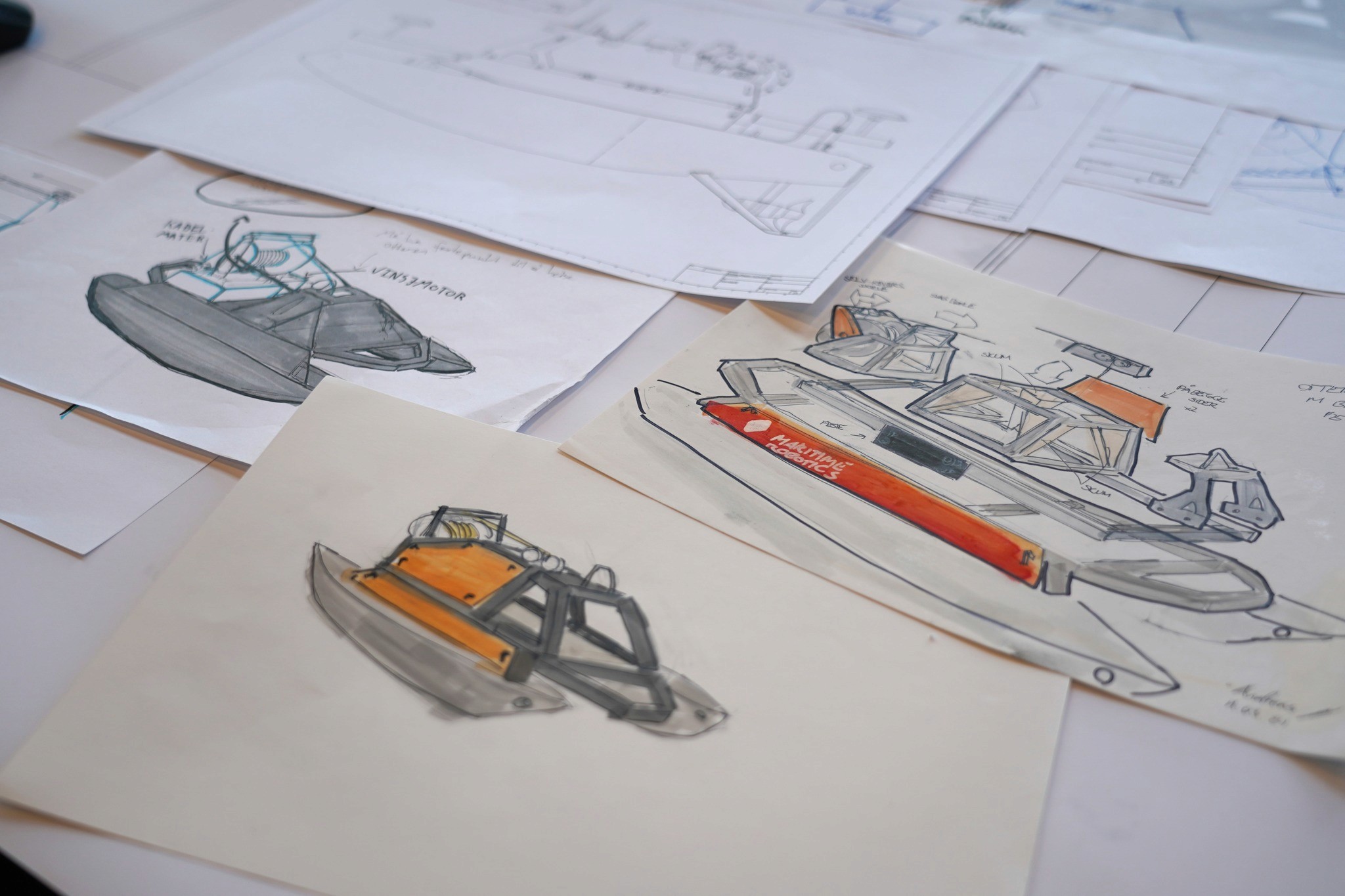
Skissering
Mye tid gikk med til enkle med skisser med tusj eller penn for å diskutrere ulike løsninger raskest mulig.
Skalamodell
En 1:5 modell av rammen til Otteren, og en 3D-print av Blueyen lot oss teste deler i papir, papp, tape og LEGO for å se proposjoner.
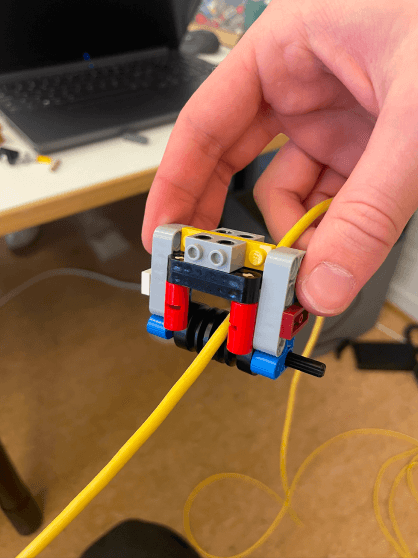
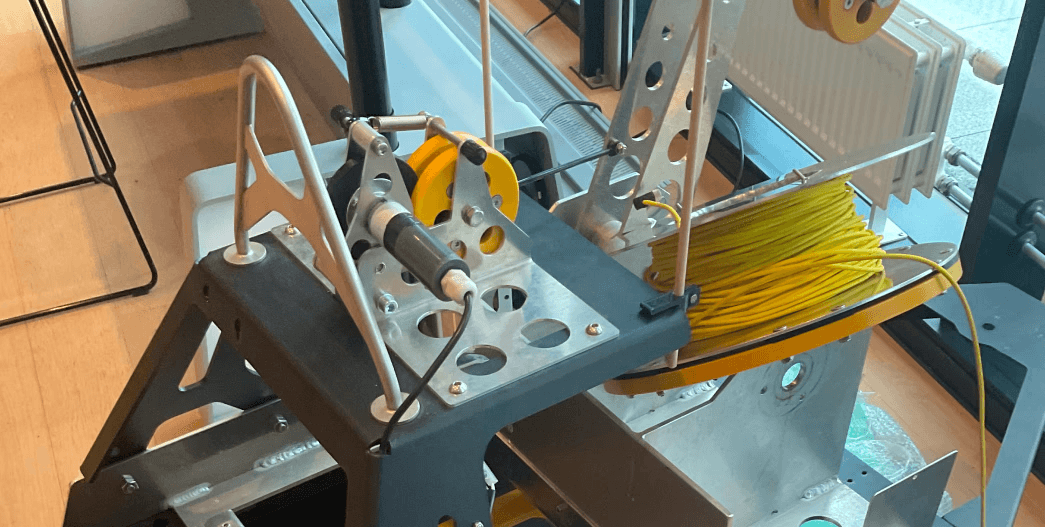
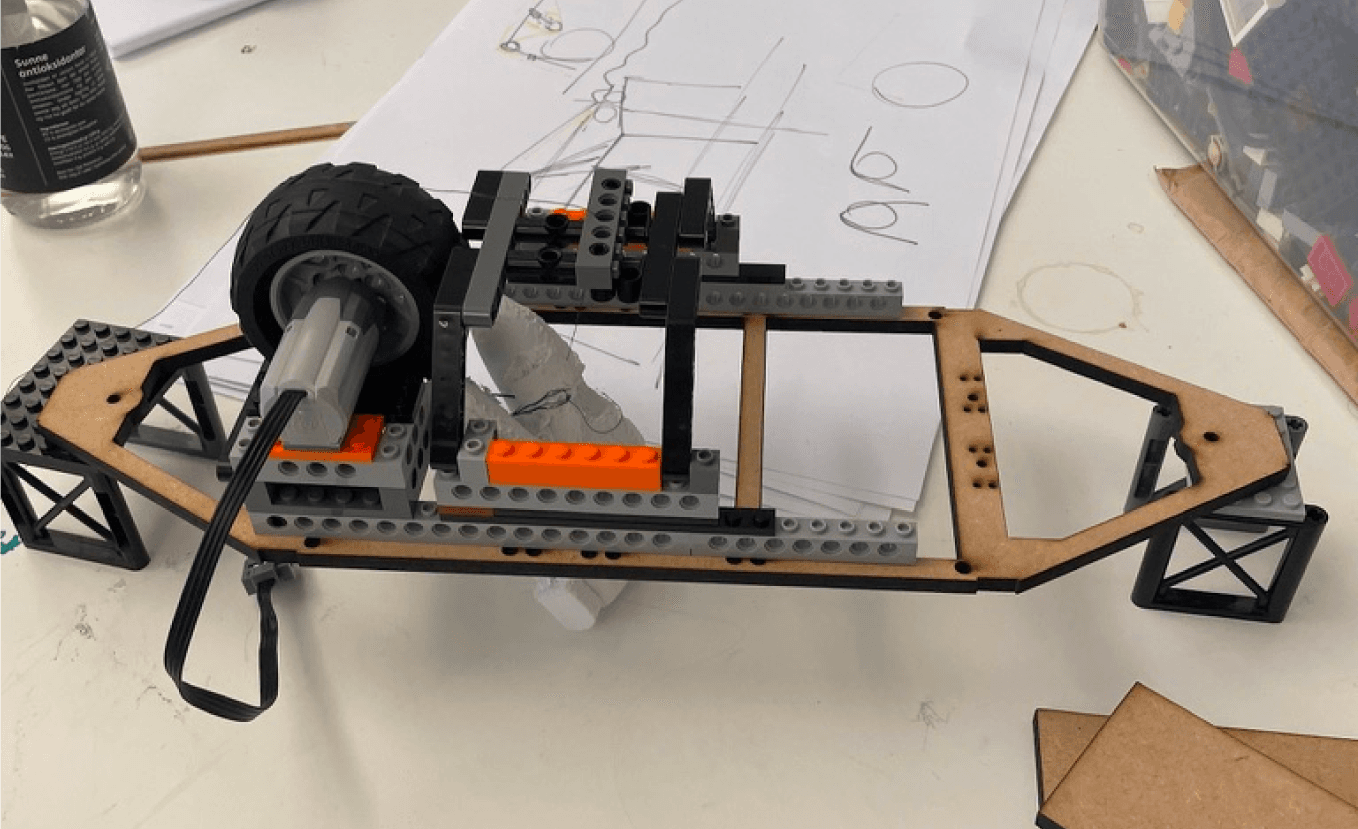
Linefører
LEGO og 3d printing ble brukt for å lage tidlige prototyper av mekaniske deler.

3D-modellering i Fusion 360
Etter å ha funnet en overordnet retning for utforming av modulen gikk vi over til Fusion 360 for å kunne se eksakte størrelsesforhold.
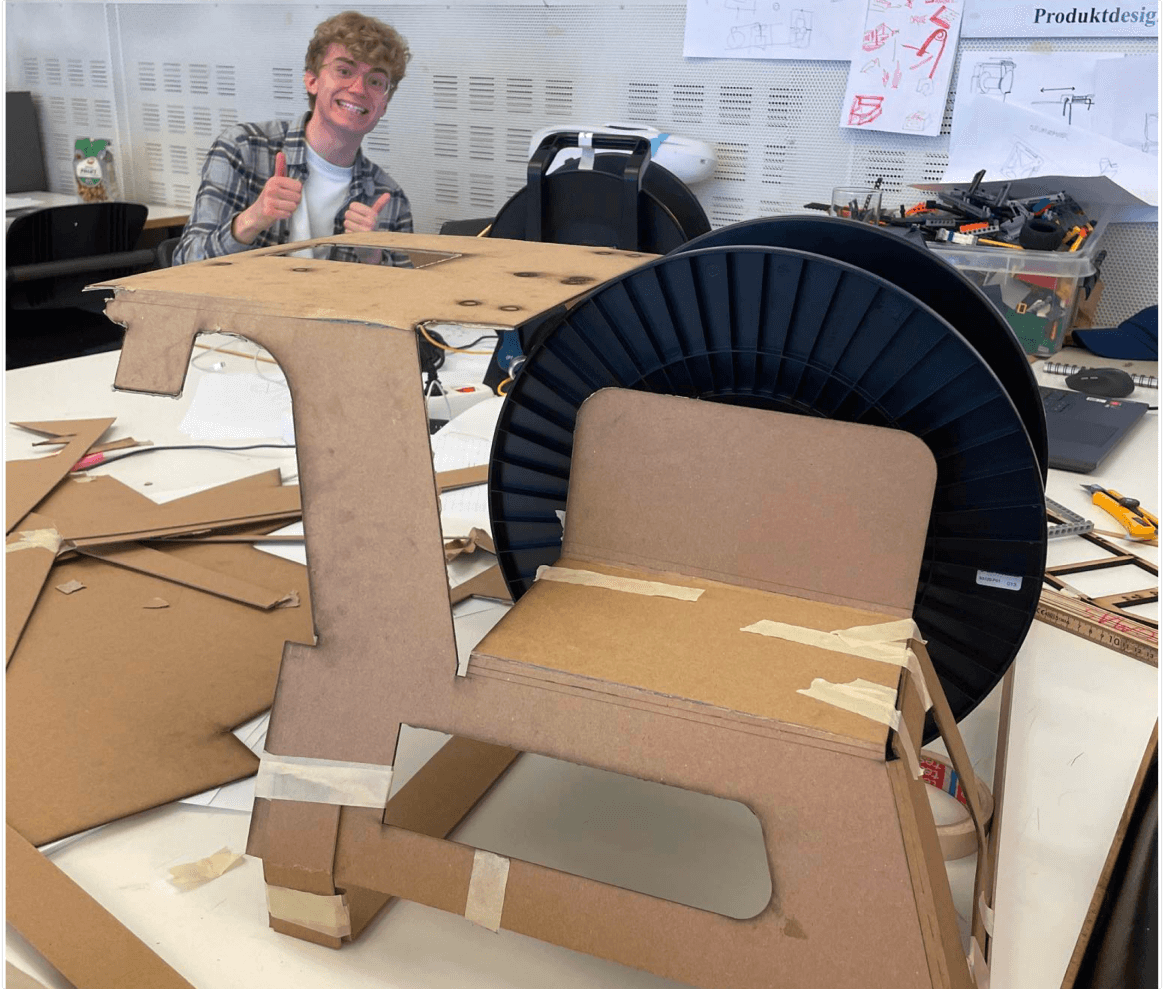
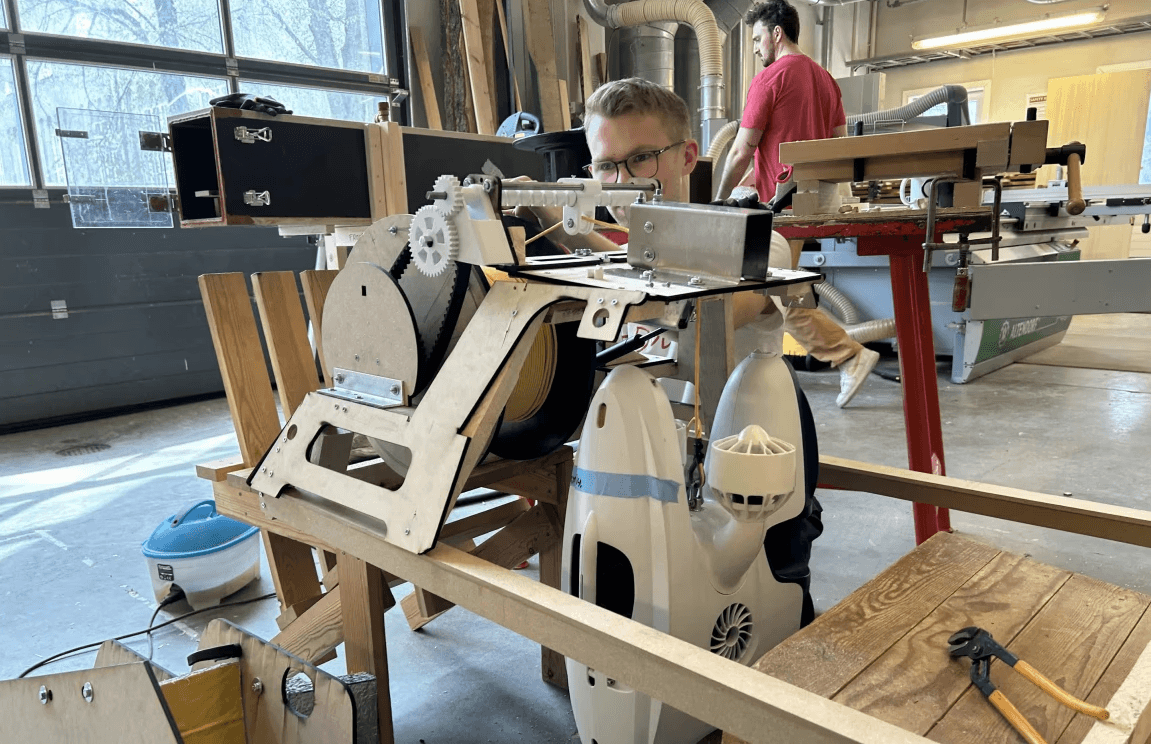

Fullskala modell
Parallellt med CAD-modellen bygde vi prototyper i papp, og til slutt i MDF og aluminium.
Et dypdykk i ROVEX
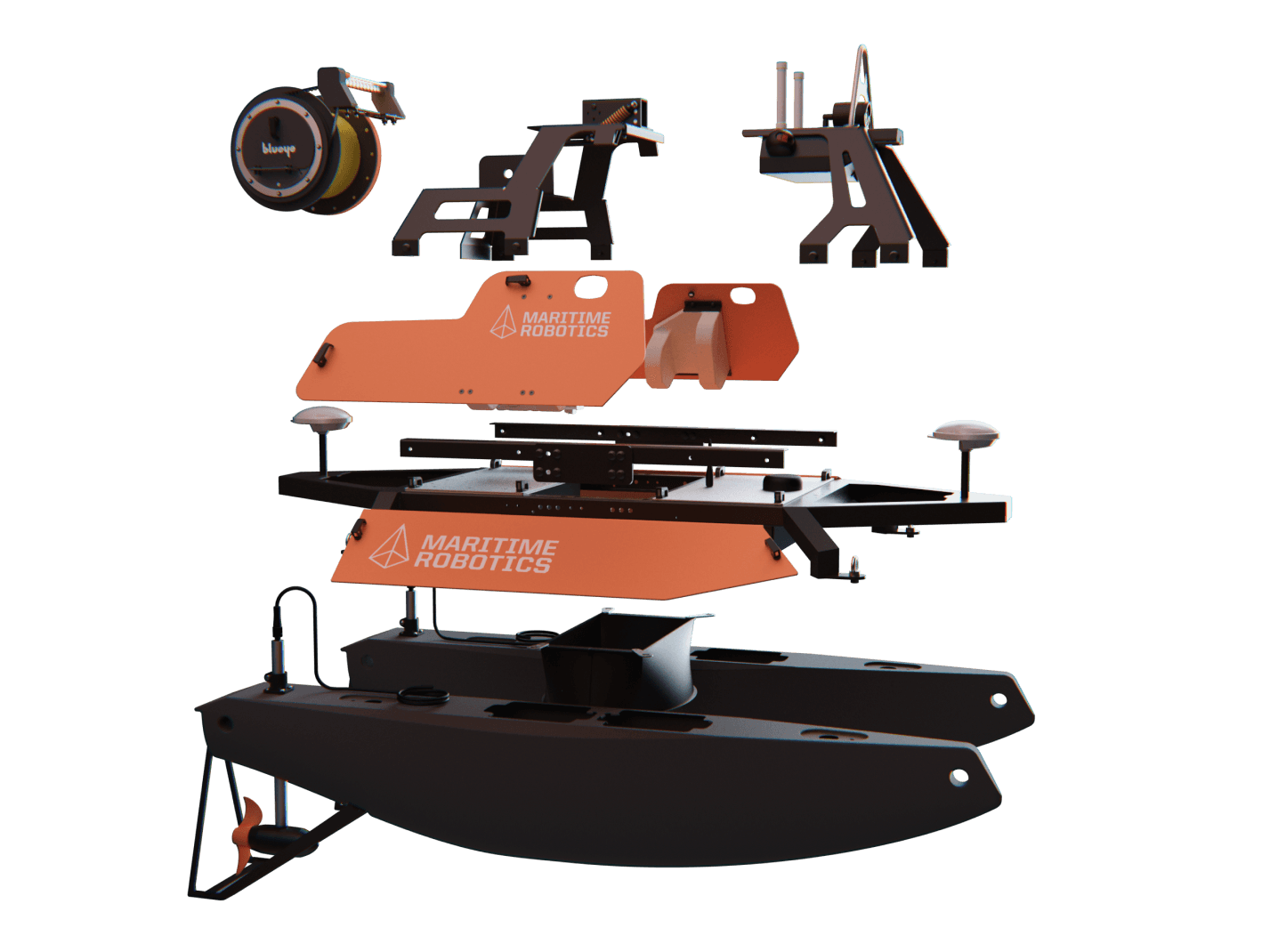
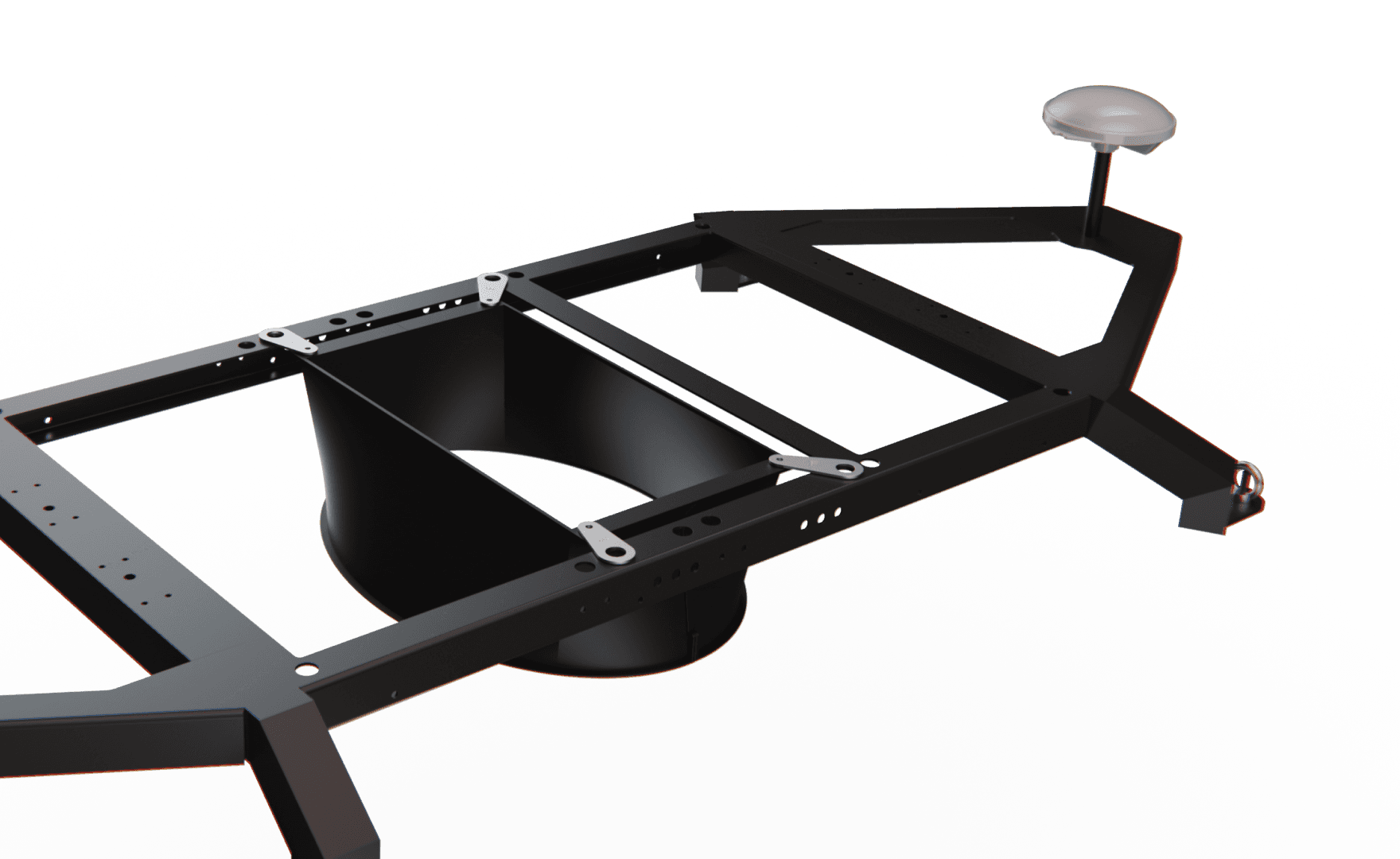
Et modulært system som arver fra Otteren
Montering krever kun at man kobler ut midtre modulboks, og flytter antennen på fremre boks. Operatører kan dermed enkelt installere ROVEX på USV-er de allerede eier.

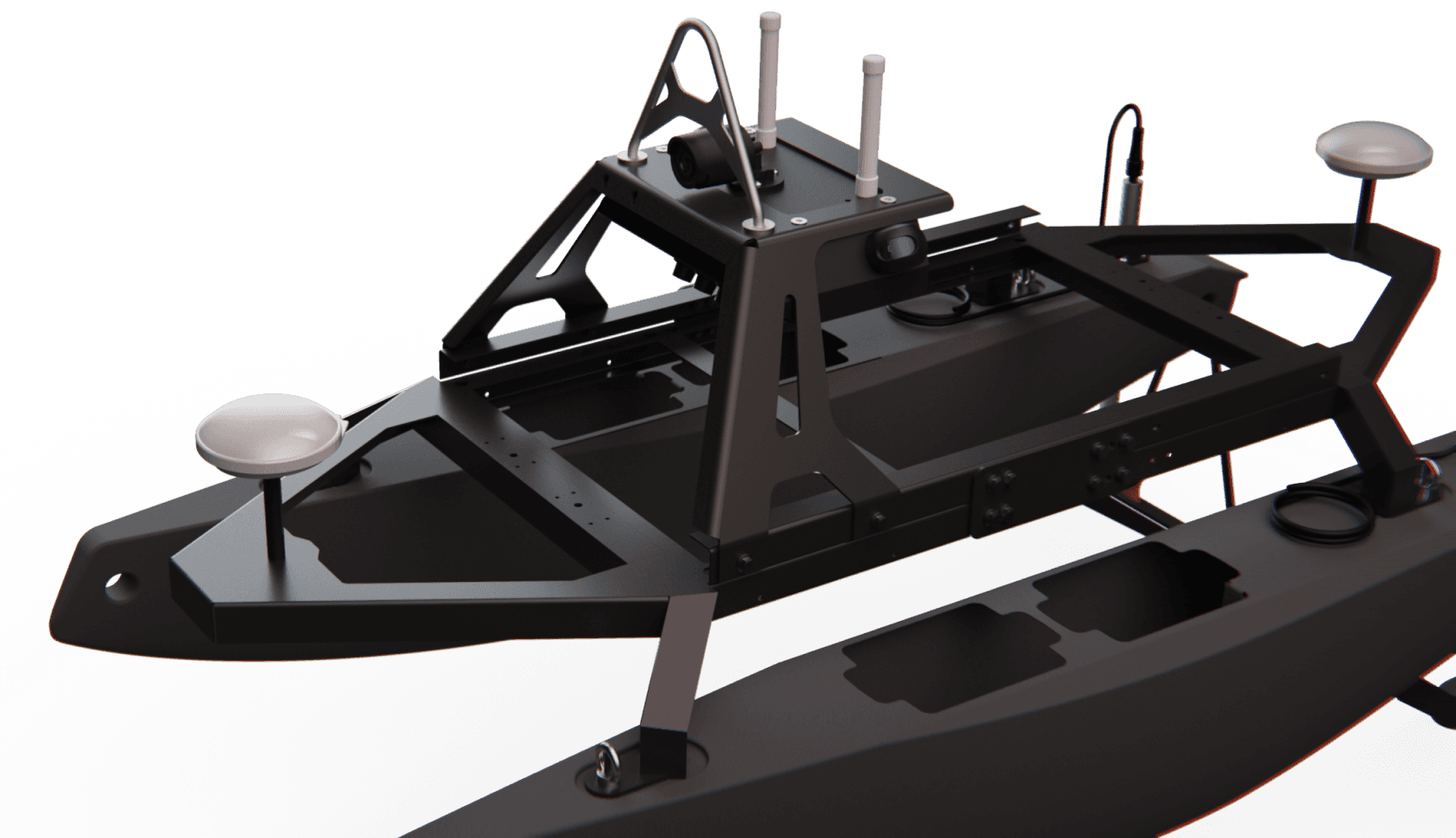
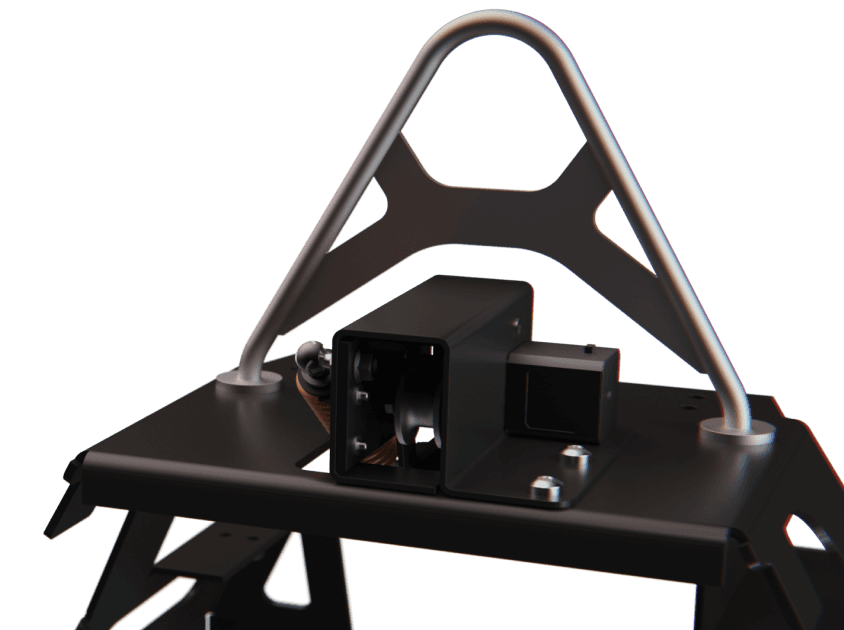
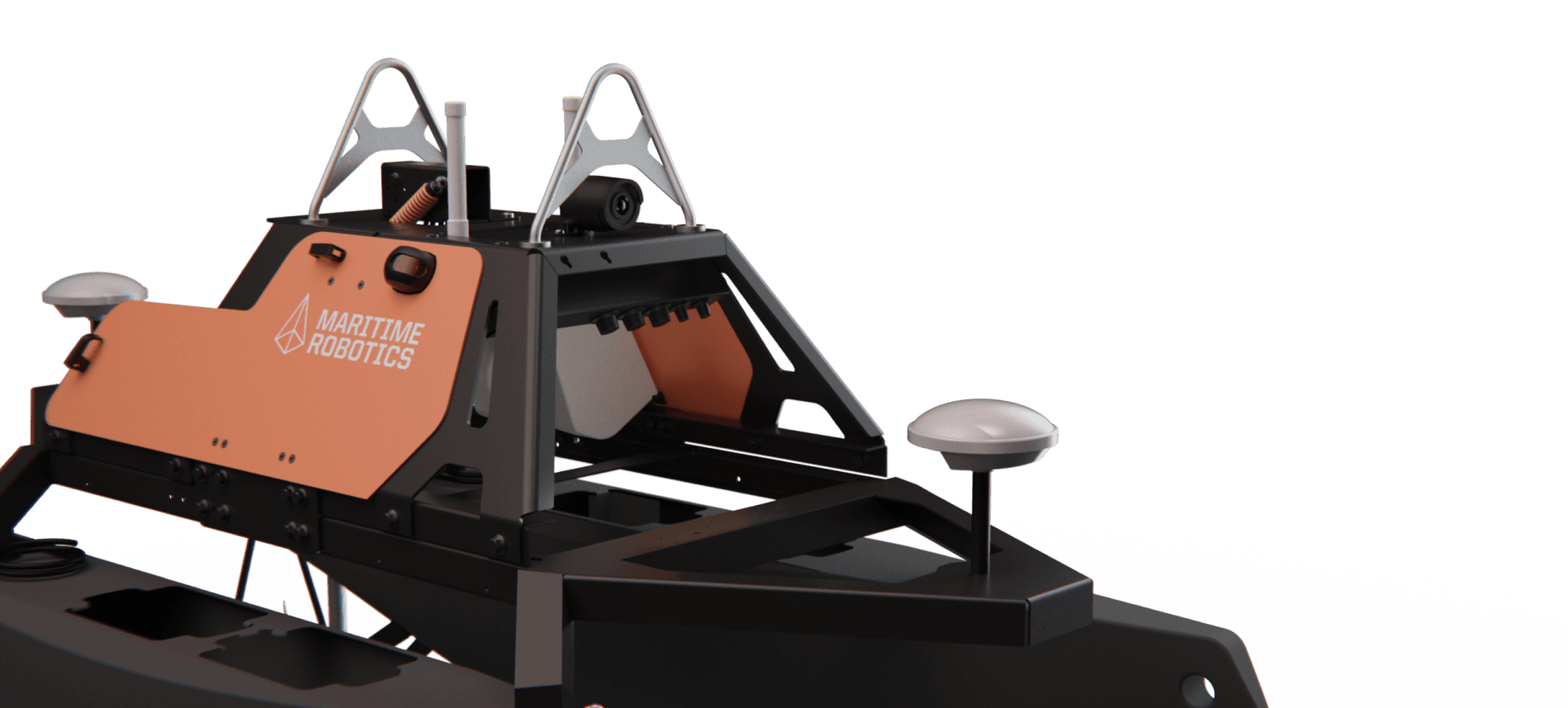
Innfesting og targabøyle
Targabyølen fra den originale Otteren flyttes fram på et nytt skinnelag, som benytter targabyølens gamle festepunkter.
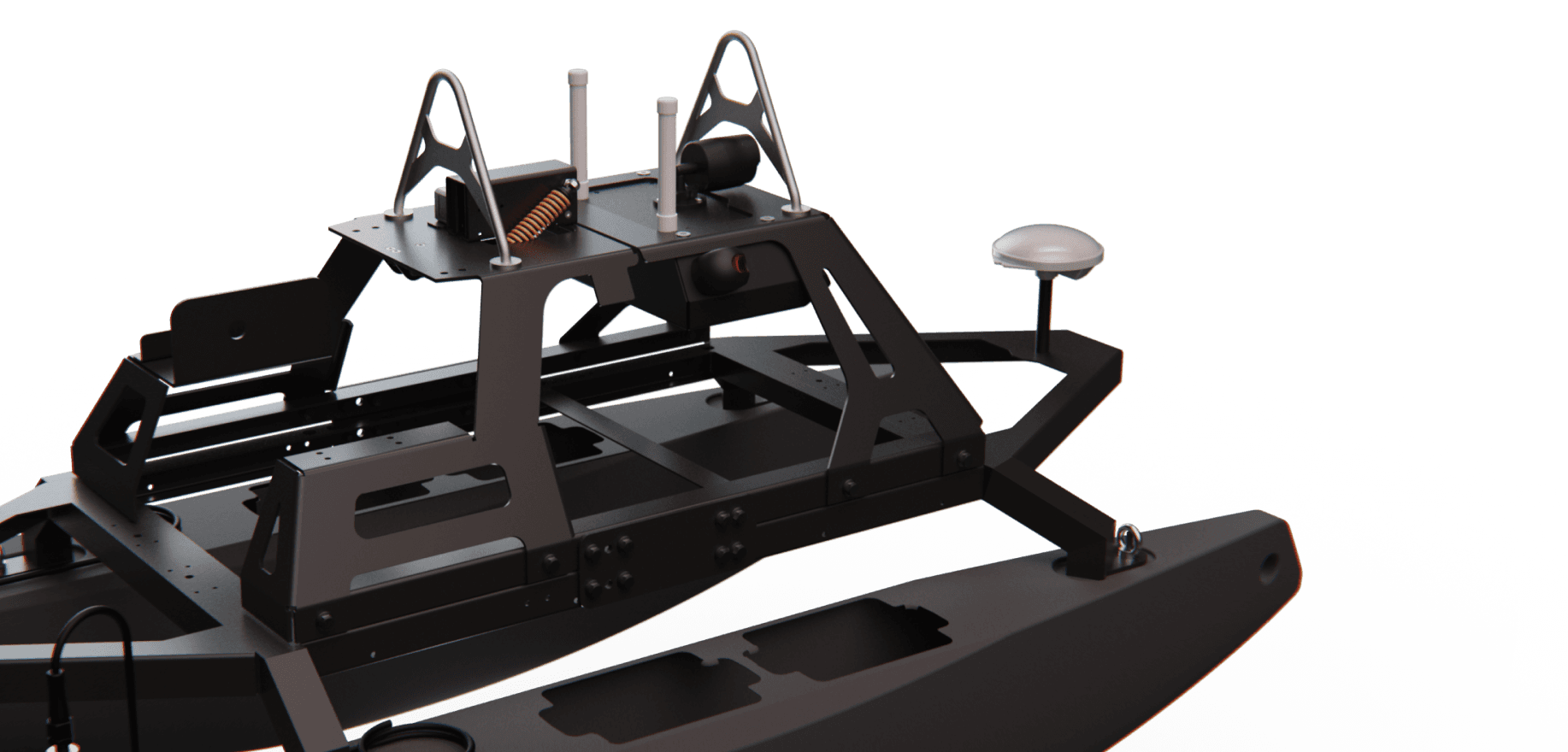
Autonom inspeksjon
ROVEX fester det meste utsyret i en ny bøyle. Her installeres også et ekstra løftepunkt for å kunne heise USV-en ut i vannet med kran.
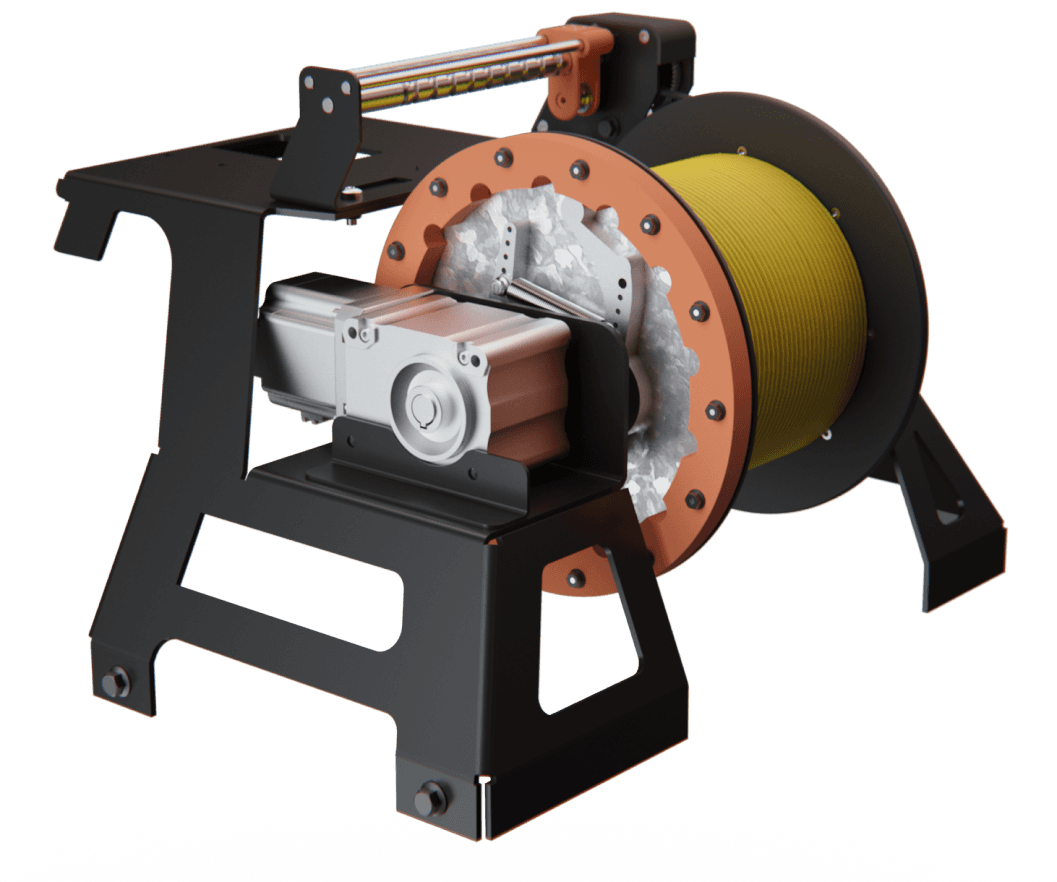
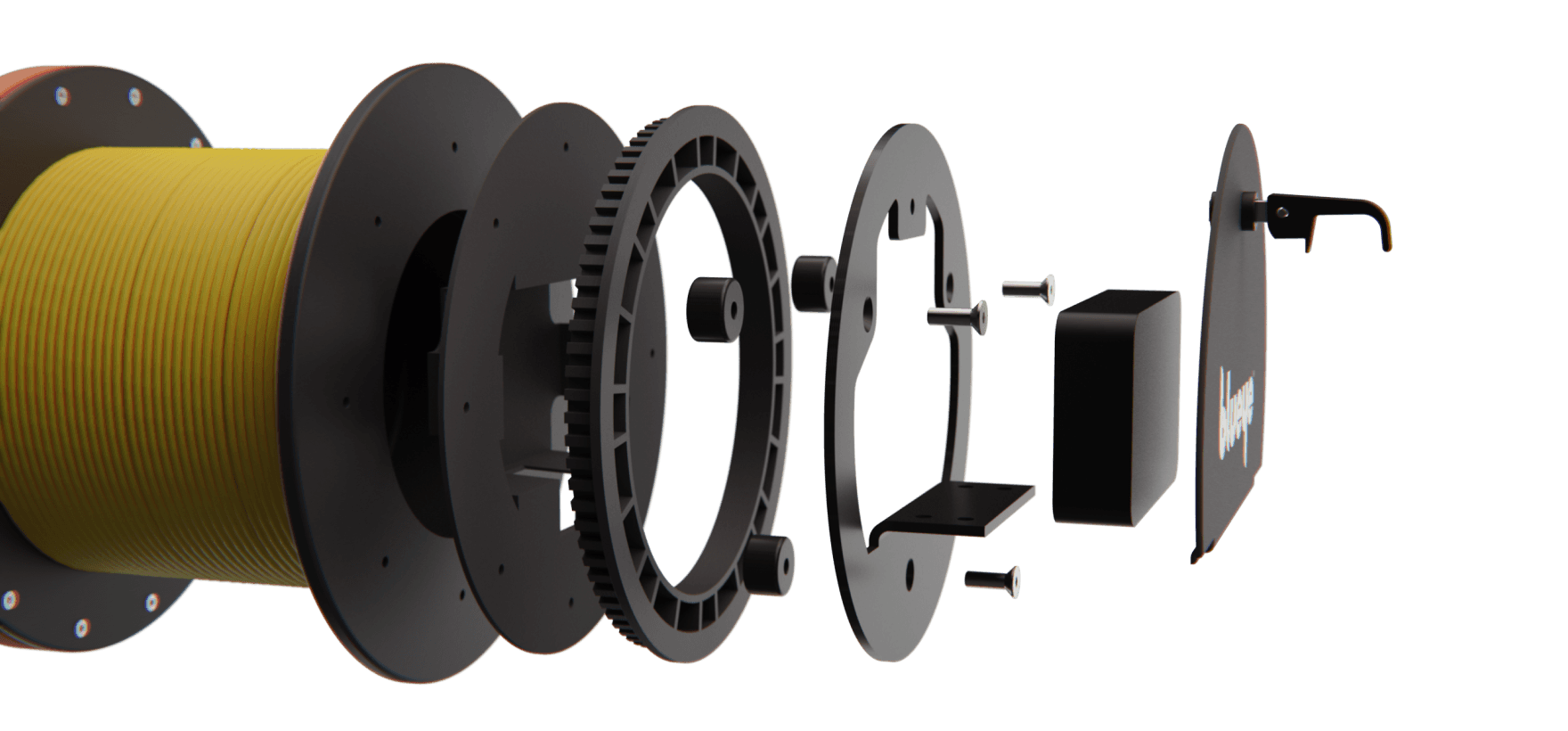
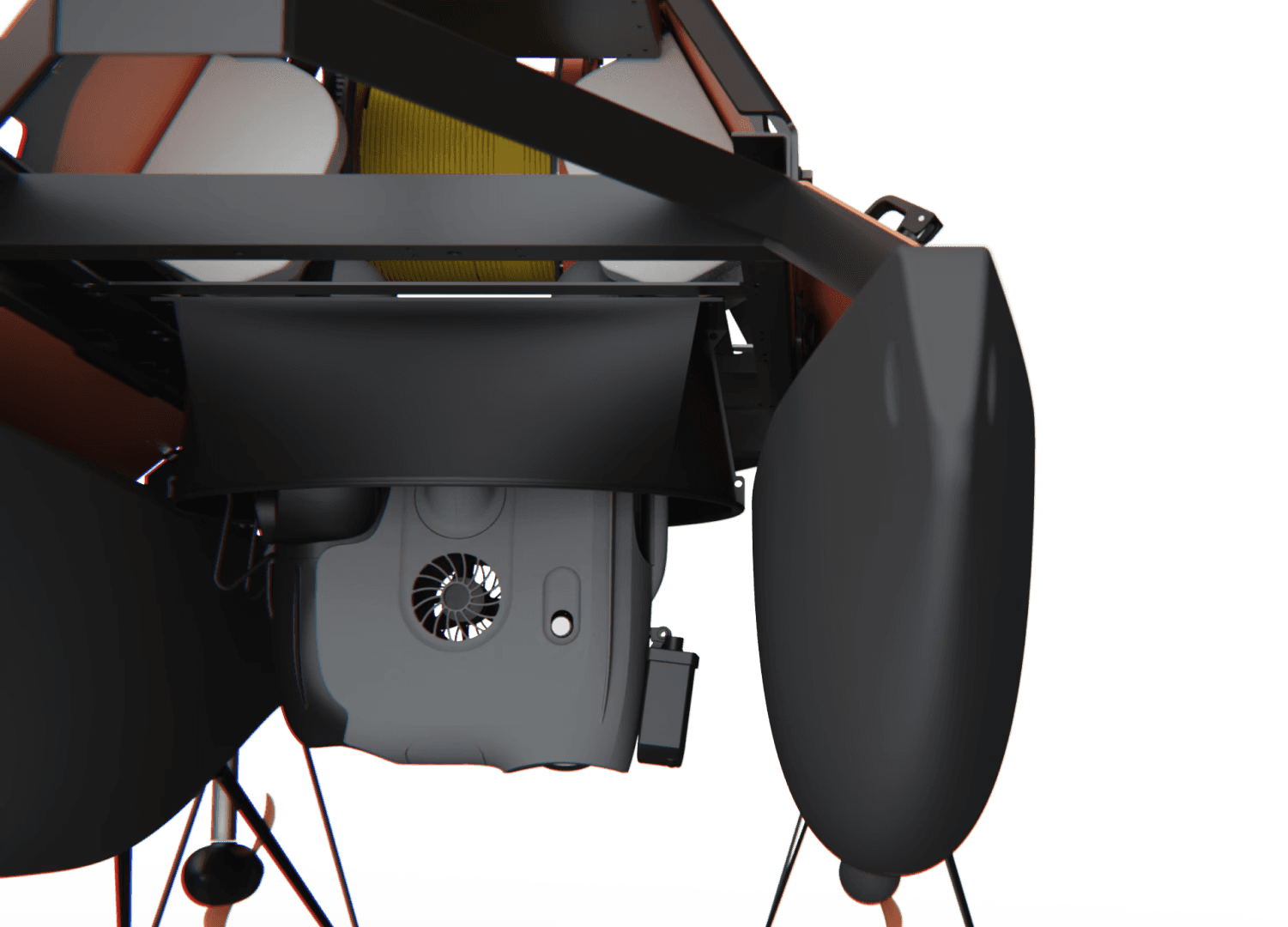
Kabeltrommel
ROVEX er utstyrt med 110 m kabel. Trommelen drives av en børsteløs DC-motor, som frikobles mekanisk dersom draget i kabelen blir for stramt.
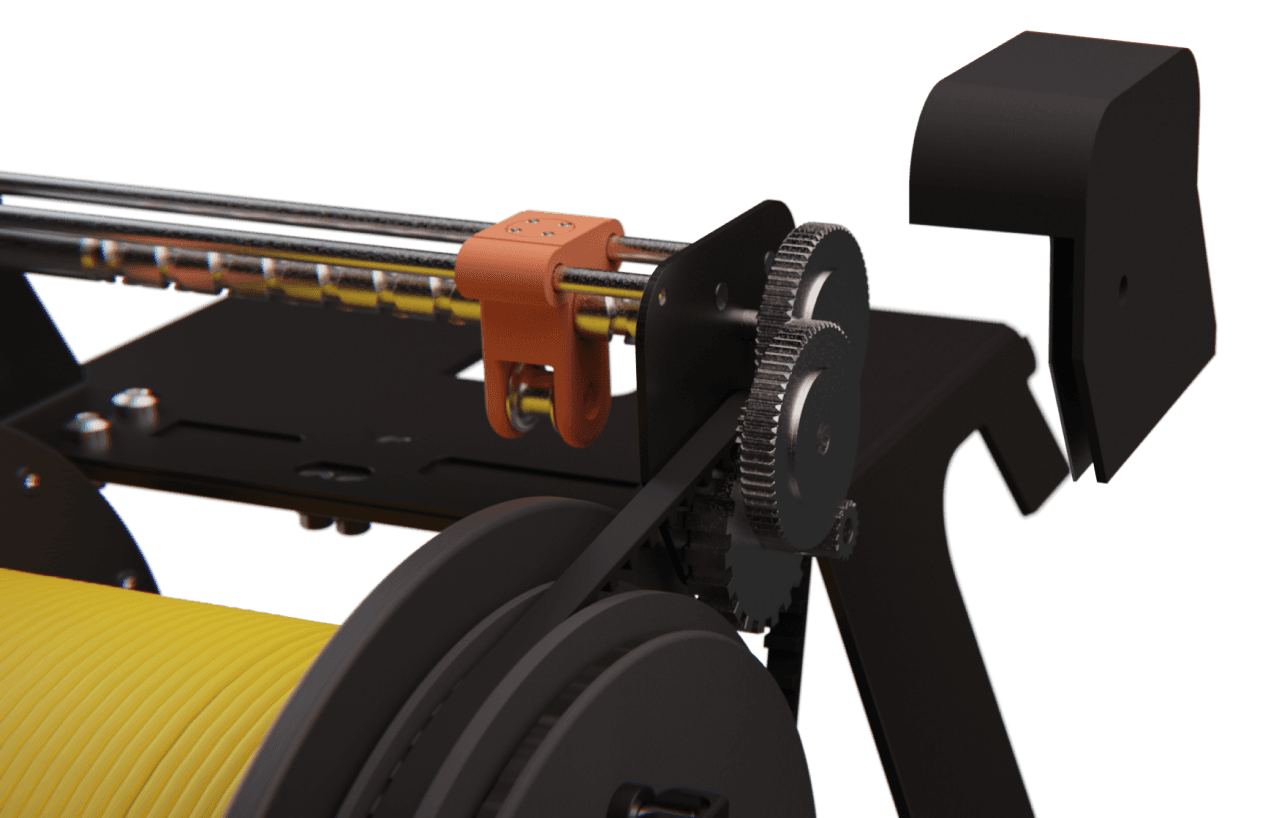
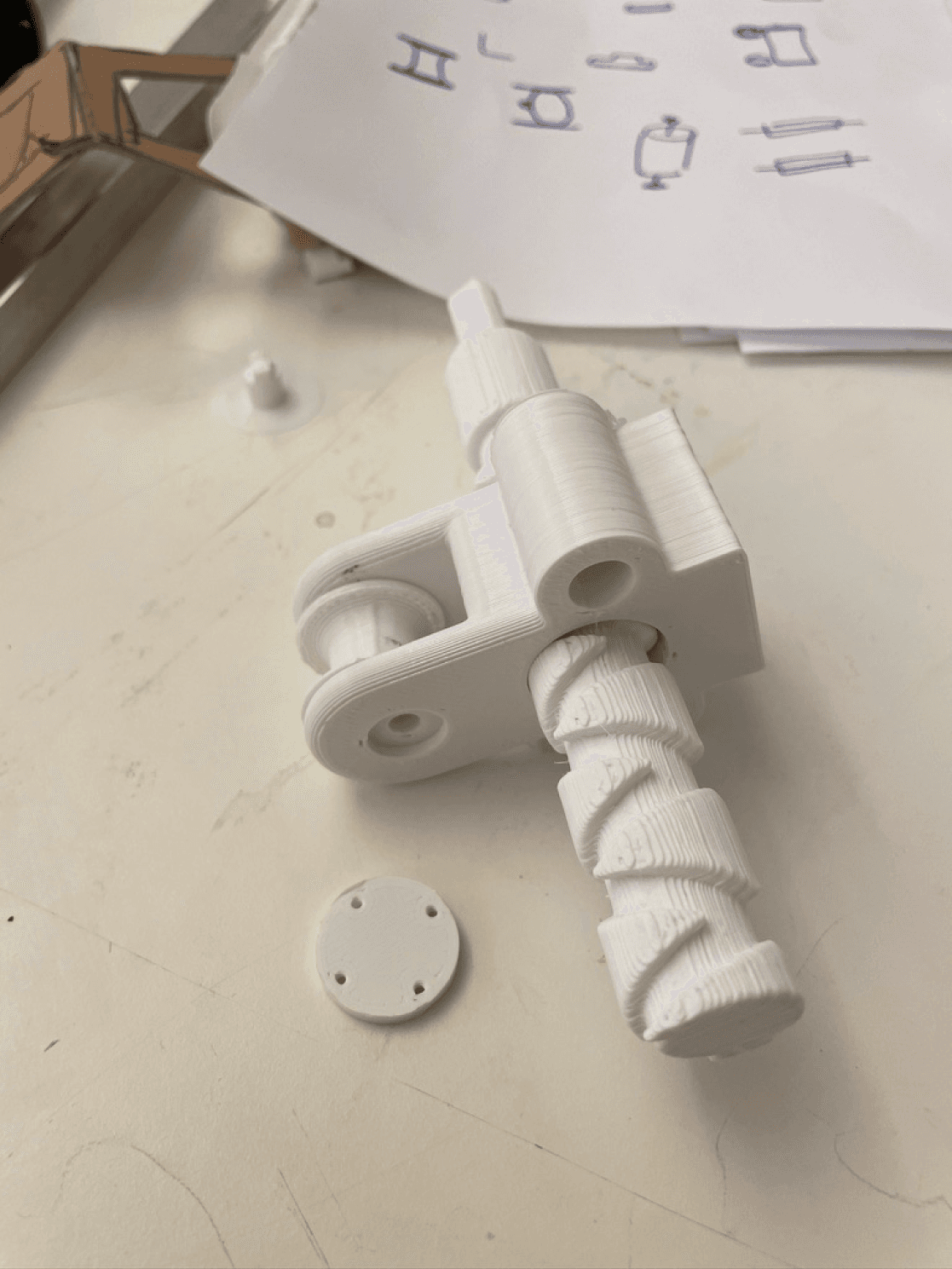
Linefører og remdrift
Trommelen er mekanisk koblet til en linefører, drevet av et belte og en selvreverserende skrue. Dette gir jevn fordeling av kabelen.
Valser og modem
På styrbord side hviler trommelen på tre valser. Dette lar Blueyes Wi-Fi-modem oppbevares i senter av trommelen, uten behov roterende elektrisk kobling.
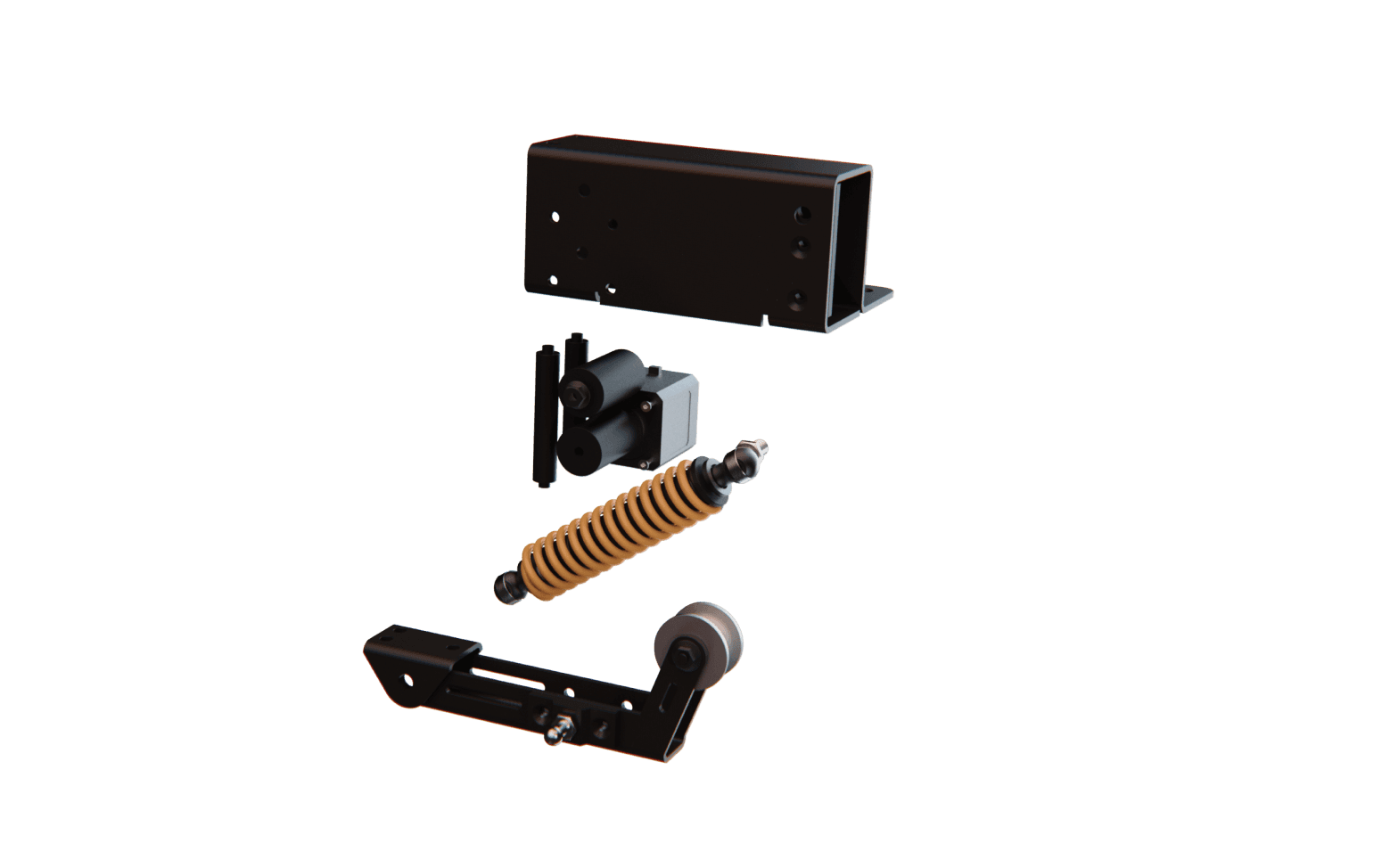
Demping
Ei arm med gassfjær demper belastningen fra rykk ved innheising. En servomotor på nedre valse holder kabelen stram for å unngå backlash.
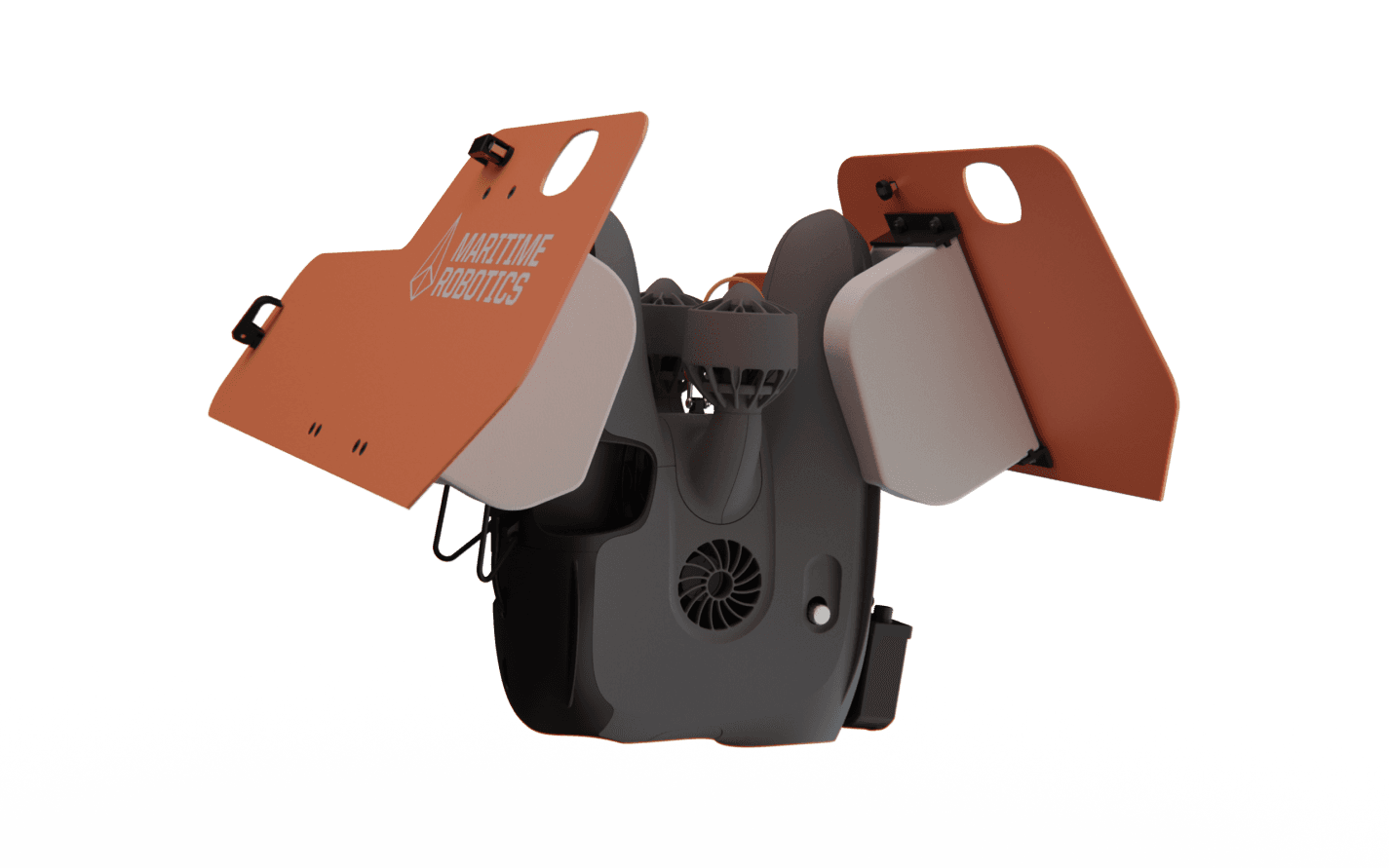
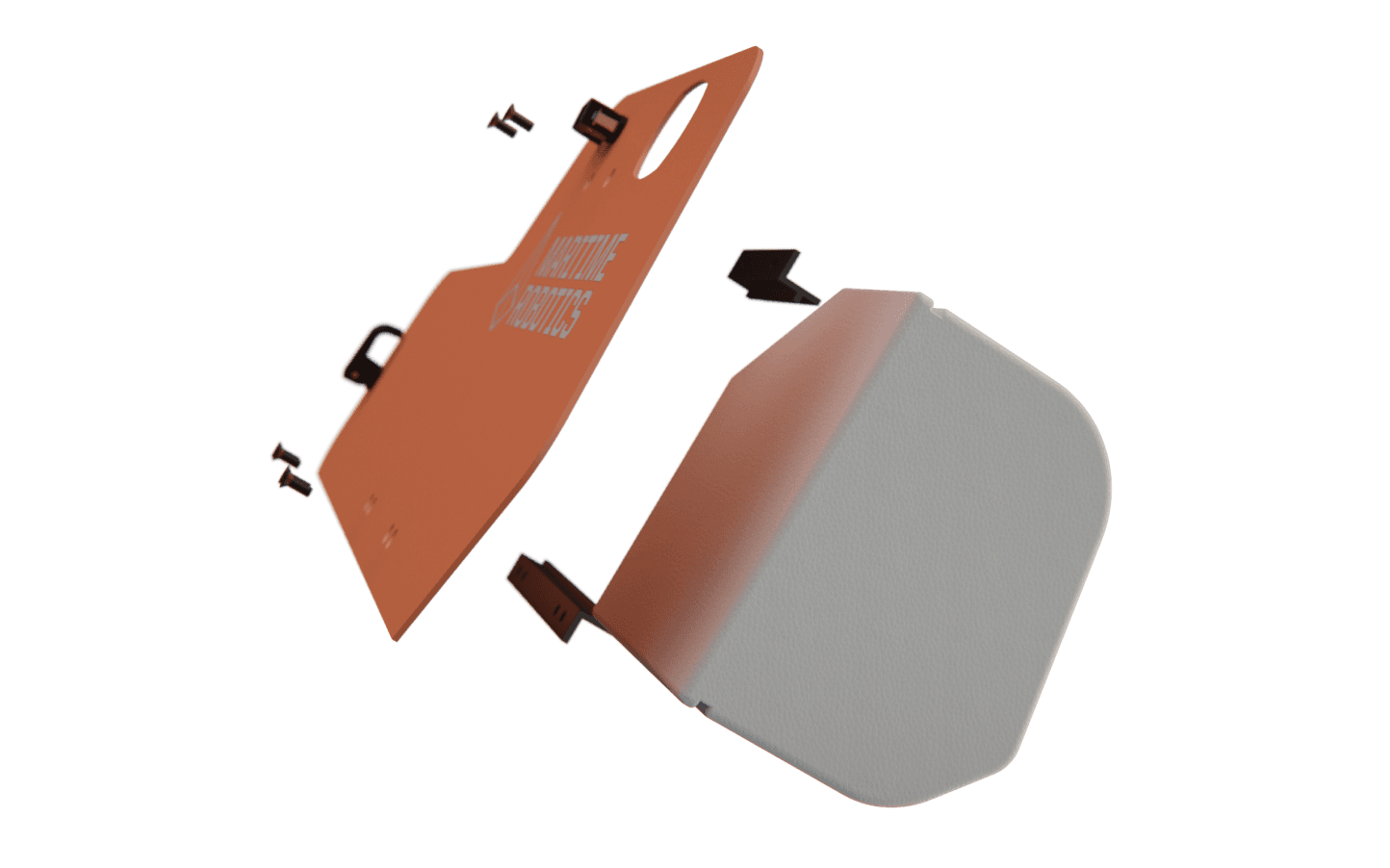
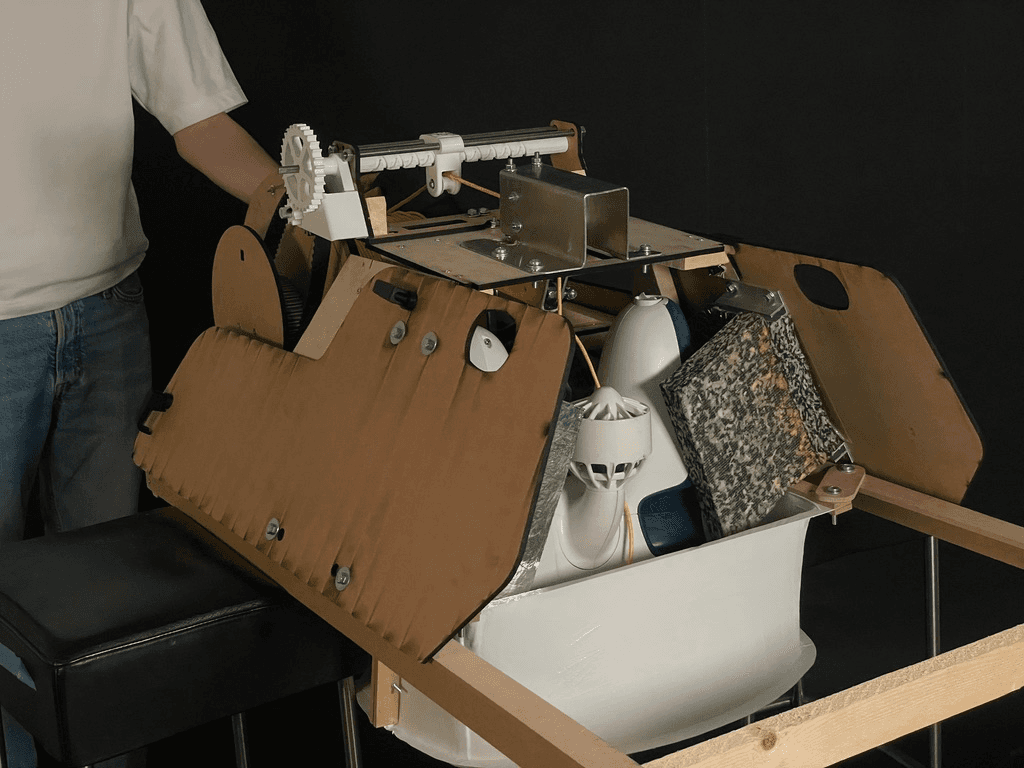
Beskyttende sidepaneler
Sidepanelene brukes som feste for skumputer trekt i vannavisende materiale. Dette beskytter blueyen fra vær og vind, og holser den stødig inne i riggen.
Enkel og kjent montering
Panelene festes til to punkter hver i bakrammen, med samme type hemper som Otterens andre paneler.
Trakt til innheising
I den opprinnelige rammen festes ei trakt for å enklere orientere Blueyen ved innheising. Trakta produseres som to deler i vakuumtrukket plast.